Research | Topics
Our work clusters into four main topics: modelling, control, optimization & robotics. We perform both curiosity driven fundamental work as well as application oriented system development.
Our activities include...
Select the pictures for more info on a topic.



Modelling
Within our modelling & identification research track, we translate system observations into models that can predict the system dynamics for unseen control inputs or parameter settings.
Fundamentals
Traditional modeling approaches rely on either expert knowledge to incorporate known physical laws or black-box approaches that learn the relations directly from the data. Each sperate paradigm has obvious drawbacks, therefore only a combination of both can offer the accuracy and robustness required. Further challenges arise when uncertainty need to be quantified when models are deployed in industrially critical applications.
Methods
Our expertise encompasses the dynamic modeling aspect of both physics-based tot data-driven approaches, and in particular on how to make the interconnection between these formalisms. This ranges from state space based data-driven models (i.e. sparse regression, deep learning) to hybrid approaches that combine both physics-inspired and black-box relations. Moreover, by incorporating stochasticity into our modeling assumptions we obtain reliable prediction models that ensure robust deployment during a wide range of operating conditions.
Applications
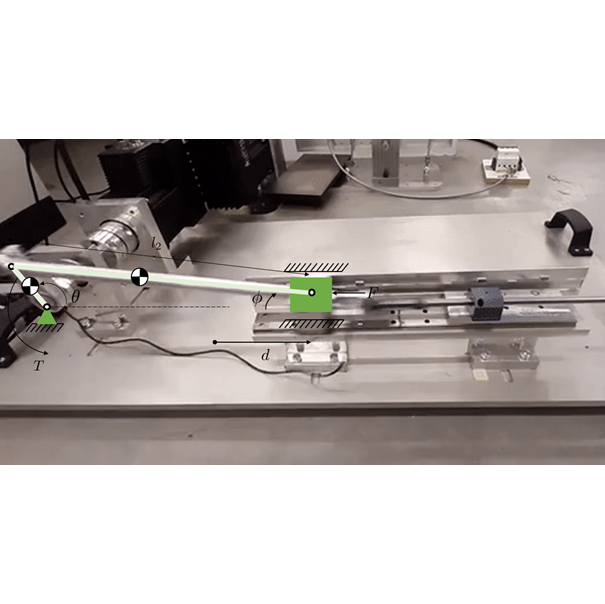
The prediction models are used for control, design and monitoring purposes of mechatronic applications and industrial robotics. Our modeling approaches have been demonstrated on various mechatronic applications such as servo driven bar-linkage systems and cam-follower mechanisms. Industrial relevance has been shown on applications such as automotive clutches, robotic joints and winding machines.
Control
Our work on control & decision making encompasses a diverse set of topics ranging from theory to practice. We endeavour not only to look beyond the horizon of fundamental knowledge, but to surpass it by studying how these methodologies can be integrated into real-world systems and processes.
Fundamentals
We investigate optimal control theory and corresponding computational procedures as an instance of probabilistic inference, or Control as Inference, and how this viewpoint allows for development of new or improved algorithms. This perspective also offers a solid framework to merge optimal control theory with Bayesian identification, so called dual or active learning control. By accounting for identification processes in the predictive control, opportunities arise to control and learn simultaneously.
Methods
Our expertise encompasses every vertical layer of control, ranging from component-level (trajectory tracking, stabilization, etc.) to system-level (trajectory optimization, motion planning, synchronization) to super-system-level and cooperative strategies (manipulation, task & motion planning). We pioneer hybrid control where the principle philosophy is to exploit tried-and-tested control principles to do most of the legwork whilst relying on data-driven concepts as an add-on to facilitate desirable features such as robustness & adaptivity or to deal with otherwise prohibitive computational complexity.
Applications
In our lab we work with a variety of experimental set-ups. Our set-ups include multiple industrial and cooperative robots, various manipulation set-ups as well as several academic and industrial mechatronic systems with one or two degrees of freedom.
Optimization & Co-design
Optimization & co-design research tracks in our group are motivated by model-based dynamical system design. In doing so we pursue enhanced dynamical system functionalities and improved performance.
Fundamentals
The conventional approach to system design consists of an iterative loop of design, implementation and testing. In model-based system design we pursue a more dominant numerical design component with the intend of minimizing the number of experimental testing cycles. The ambitious first time right-paradigm aspires to reduce the number of testing cycles to one. This has translated itself in the pursuit of including high-fidelity models, multi-disciplinary approaches and uncertainty modelling and propagation techniques in the development cycle.
Methods
In model-based system design a performance measure is attributed to the model parameters and optimized. Traditionally, design and trajectories are treated separately. The theory of combined control and design, or co-design, links the design and trajectory optimization approaches. As a result, co-design extends the design space in ways that lead to coupled design and optimal control solutions that are not obtainable through a conventional sequential approach. Even though modelling has become feasible, performing the entire design process or even carrying out an optimization on such a system might be an unfeasible problem without the use of a dedicated computational framework. Such is realized by means of Bayesian Optimization, a Machine Learning approach which leverages on Gaussian processes and Bayesian probabilistics.
Applications
Particular attention has been given to unmanned aerial systems as application area. The widespread use of unmanned aerial vehicles has become clear over recent years, thanks to its increasing ability to be deployed for a series of comprehensive tasks: from the more well-known military up to and including its humanitarian counterpart. However, fundamental research on optimization and co-design within the context of model-based system design links directly to the robotic systems design research tracks examined in our group.
Robotics
We help develop the next generation of robots and robotic subsystems. Guided by advanced models of their dynamics, we come with new designs to solve real-world problems, often in an industrial setting.
Fundamentals
The models that are constructed to design our robots and subsystems include custom sensor models (tactile sensing, joint torque sensing) as well as observers (velocity, external load), actuator models (motor, drive, clutch) to estimate steady state performance and transient behavior, the multi-body dynamic equations for the robot’s dynamics with and without external load (teaching by demonstration versus collisions) alongside state-of-the-art controllers as discussed above.
Methods
Our expertise encompasses both hard- and software design. The hardware design includes both sensing (tactile sensing, joint torque sensing for external load estimation & collision detection) and actuation (torque dense motor design, series clutched actuation) as well as multi-degrees-of-freedom robot design. The software design can be low-level (position, force/torque and impedance control) or high-level (trajectory planning, manipulation, task & motion planning).
Applications
Our lab has multiple robotic setups including collaborative robots (UR5e, UR10e), high-speed industrial robots (KUKA KR 6 R700-2), mobile robots (Unitree) and several smaller robotic setups (Robotis/Dynamixel). Our custom designs include novel tactile sensors for grippers and animal-like robots, axial flux motors with increased torque density (by using anodized aluminum foil stator windings), an acrobot, several robotic grippers and a custom designed collision tolerant industrial robot that can switch between collaborative and high-speed mode.